2024

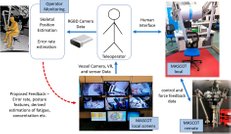
Cyber–physical system architecture of autonomous robot ecosystem for industrial asset monitoring
Kivrak, H., Karakusak, M.Z., Watson, S., Lennox, B.
Computer Communications, 218, pp. 72-84. 2024.

Towards wireless communication in control systems of the civil nuclear energy sector
Lopez Pulgarin, E.J., Herrmann, G., Hollinshead, C., May,J., Gebremicael, K.N., Daw, D.
EEE transactions on neural networks and learning systems, 35(2), pp. 2732-2746

Control practice for robotic applications in challenging environments
Zhang, K., Herrmann, G.
Annual Reviews in Control, 57, art. no. 100956. 2024.

Distributed Neural Networks Training for Robotic Manipulation With Consensus Algorithm
Liu, W., Niu, H., Jang, I., Herrmann, G., Carrasco, J.
Annual Reviews in Control, Volume 57, 2024
2023
Using skeletal position to estimate human error rates in telemanipulator operators
Piercy, T., Herrmann, G., Cangelosi, A., Zoulias, I.D., Lopez, E.
Front. Robot. AI, 09 January 2024 Sec. Computational Intelligence in Robotics Volume 10 - 2023
Localising and identifying radionuclides via energy-resolved angular photon responses
Tsitsimpelis, I., Alton, T., West, A., Taylor, C.J., Lennox, B., Livens, F.R., Joyce, M.J.
Nuclear Instruments and Methods in Physics Research, Section A: Accelerators,
Spectrometers, Detectors and Associated Equipment, 1057, art. no. 168771. 2023

Exploration of Underwater Environments with a Swarm of Heterogeneous Surface Robots
He, Y., Yao, K., Lennox, B., Arvin, F.
ICSI Conference Paper. 2023

Sim-and-Real Reinforcement Learning for Manipulation: A Consensus-based Approach
Liu, W., Niu, H., Pan, W., Herrmann, G., Carrasco, J.
IEEE International Conference on Robotics and Automation (ICRA). 2023
Microwave Sensing for Avoidance of High-Risk Ground Conditions for Mobile Robots
Banche J., Mitchell D., West A., Harper S., Groves K., Lennox B., Watson S., Flynn D.
IEEE International Conference on Omni-Layer Intelligent Systems, COINS. 2023

Phase Limitations of Multipliers at Harmonics
Heath, William P; Carrasco, Joaquin; Zhang, Jingfan
IEEE transactions on automatic control. 2023
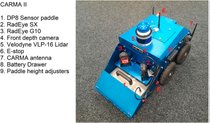
CARMA II: A ground vehicle for autonomous surveying of alpha, beta and gamma radiation
Nouri Rahmat Abadi B., West A., Nancekievill M., Ballard C., Lennox B., Marjanovic O., Groves K.
Frontiers in Robotics and AI. 2023
MIRRAX: A Reconfigurable Robot for Limited Access Environments
Cheah W., Groves K., Martin H., Peel H., Watson S., Marjanovic O., Lennox B.
IEEE Transactions on Robotics. 2023
Federated Reinforcement Learning for Collective Navigation of Robotic Swarms
Na S., Roucek T., Ulrich J., Pikman J., Krajnik T.S., Lennox B., Arvin F.
IEEE Transactions on Cognitive and Developmental Systems. 2023

Jiang Z., Jovan F., Moradi P., Richardson T., Bernardini S., Watson S., Weightman A., Hine D.
Journal of Field Robotics. 2023
2022
Implementing and Assessing a Remote Teleoperation Setup with a Digital Twin Using Cloud Networking
Lopez Pulgarin E.J., Niu H., Herrmann G., Carrasco J.
Proceedings - 2022 IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks, WoWMoM 2022

Mixed Controller Design for Multi-Vehicle Formation Based on Edge and Bearing Measurements
Wu K., Hu J., Lennox B., Arvin F.
2022 European Control Conference, ECC 2022
Internal State-Based Risk Assessment for Robots in Hazardous Environment
David J., Bridgwater T., West A., Lennox B., Giuliani M.
Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics)

Real-Time Avoidance of Ionising Radiation Using Layered Costmaps for Mobile Robots
West A., Wright T., Tsitsimpelis I., Groves K., Joyce M.J., Lennox B.
Frontiers in Robotics and AI. 2022

Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring
Hu J., Niu H., Carrasco J., Lennox B., Arvin F.
Aerospace Science and Technology. 2022
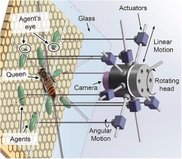
A Minimally Invasive Approach Towards “Ecosystem Hacking” With Honeybees
Stefanec M., Hofstadler D.N., Krajník T., Turgut A.E., Alemdar H., Lennox B., Şahin E., Arvin F., Schmickl T.
Frontiers in Robotics and AI. 2022

Vega—A small, low cost, ground robot for nuclear decommissioning
Bird B., Nancekievill M., West A., Hayman J., Ballard C., Jones W., Ross S., Wild T., Scott T., Lennox B.
Journal of Field Robotics. 2022

Radiation tolerance of a small COTS single board computer for mobile robots
West A., Knapp J., Lennox B., Walters S., Watts S.
Nuclear Engineering and Technology
. 2022
Set-point Control for a Ground-based Reconfigurable Robot
Cheah W., Adorno B.V., Watson S., Lennox B.
IEEE International Conference on Intelligent Robots and Systems. 2022
2021

Simultaneous, Robot-Compatible γ-Ray Spectroscopy and Imaging of an Operating Nuclear
Reactor
Tsitsimpelis, I, West, A, Licata, M, Aspinall, MD, Jazbec, A, Snoj, L, Martin, P, Lennox, B & Joyce, MJ.
IEEE Sensors Journal. 2021
Self-Organised Collision-Free Flocking Mechanism in Heterogeneous Robot Swarms
Ban Z., Hu J., Lennox B., Arvin F.
Mobile Networks and Applications. 2021
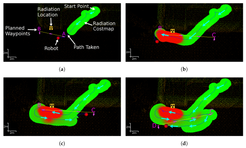
Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation
Groves K., Hernandez E., West A., Wright T., Lennox B.
Robotics. 2021

Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges
Wright T., West A., Licata M., Hawes N., Lennox B.
Robotics. 2021
Radiation Testing of Low Cost, Commercial Off the Shelf Microcontroller Board
Fried T., Di Buono A., Cheneler D., Cockbain N., Dodds J.M., Green P.R., Lennox B., Taylor C.J., Monk S.D.
Nuclear Engineering and Technology. 2021
Use of Gaussian Process Regression for Radiation Mapping of a Nuclear Reactor with a Mobile Robot
West A., Tsitsimpelis I., Licata M., Jazbec A., Snoj L., Joyce M.J., Lennox B.
Scientific reports. 2021

Autonomous Elbow Controller For Differential Drive In-Pipe Robots
Brown, L, Carrasco, J & Watson, S.
Robotics. 2021
Heggo, Mohammad; Mohammed, Anees; Melecio, Juan; Kabbabe, Khristopher; Tuohy, Paul; Watson, Simon; Durovic, Sinisa
Robotics. 2021
A Model-free Deep Reinforcement Learning Approach for Robotic Manipulators Path Planning
Liu W., Niu H., Mahyuddin M.N., Herrmann G., Carrasco J.
International Conference on Control, Automation and Systems. 2021

Path Planning for a Reconfigurable Robot in Extreme Environments
Cheah W., Garcia-Nathan T.B., Groves K., Watson S., Lennox B.
Proceedings - IEEE International Conference on Robotics and Automation. 2021

Self-organised Flocking of Robotic Swarm in Cluttered Environments
Liu Z., Turgut A.E., Lennox B., Arvin F.
Lecture Notes in Computer Science. 2021

Coffey P., Smith N., Lennox B., Kijne G., Bowen B., Davis-Johnston A., Martin P.A.
Journal of Hazardous Materials. 2021
Dimitrov M., Groves K., Howard D., Lennox B.
Proceedings - IEEE International Conference on Robotics and Automation. 2021
An assessment of contamination pickup on ground robotic vehicles for nuclear surveying application
Banos A., Hayman J., Wallace-Smith T., Bird B., Lennox B., Scott T.B.
Journal of Radiological Protection. 2021
2020

Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots
Liu, Z, West, C, Lennox, B & Arvin, F.
Sensors. 2020
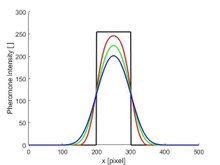
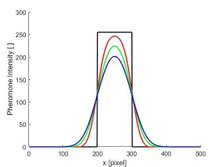
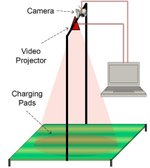
Bio-inspired Artificial Pheromone System for Swarm Robotics Applications
INa, S, Qiu, Y, Turgut, AE, Ulrich, J, Krajnik, T, Yue, S, Lennox, B & Arvin, F.
Adaptive Behaviour. 2020

Localisation of Unmanned Underwater Vehicles (UUVs) in Complex and Confined Environments: A Review
Watson, S, Duecker, D. A, & Groves, K.
Sensors. 2020

A Multi-Robot Platform for the Autonomous Operation and Maintenance of Offshore Wind Farms
Bernardini, S, Jovan, F, Jiang, Z, Moradi, P, Richardson, T, Sadeghian, R, Sareh, S, Watson, S & Weightman, A
Autonomous Agents and Multi-Agent Systems (AAMAS) 2020.

Use of Robots and Autonomous Systems in the UK
Use of Robots and Autonomous Systems in the UK(Korean)
Watson S, Lennox B, Jones J.
Nuclear Industry, 2020 Mar;405:77.

Zhang K, Hutson C, Knighton J, Herrmann G.
Waste Management Symposia. 2020
Bio-inspired Artificial Pheromone System for Swarm Robotics Applications
Na S, Qiu Y, Turgut AE, Ulrich J, Krajnik T, Yue S et al.
Adaptive Behavior. 2020 Mar 23.

Radiation Tolerance Testing Methodology of Robotic Manipulator Prior to Nuclear Waste Handling
Zhang K, Hutson C, Knighton J, Herrmann G, Scott T. Frontiers
Robotics and AI. 2020 Feb 6;7.

2019
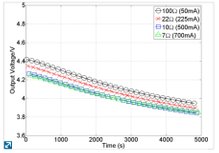
Limitations of Wireless Power Transfer Technologies for Mobile Robots
Cheah W, Watson S, Lennox B.
Wireless Power Transfer. 2019 Oct 7.
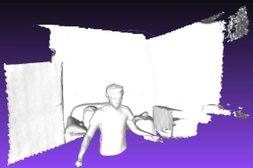
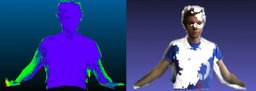
FullFusion: A Framework for Semantic Reconstruction of Dynamic Scenes
Bujanca M, Luján M, Lennox B.
The IEEE International Conference on Computer Vision (ICCV) Workshops. 2019
Bujanca M, Gafton P, Saeedi S, Nisbet A, Bodin B, O'Boyle MF et al.
In 2019 International Conference on Robotics and Automation (ICRA). IEEE. 2019
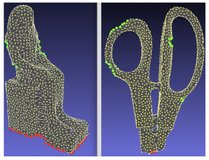
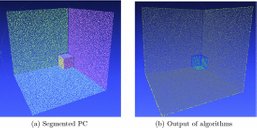
Autonomous Void Detection and Characterisation in Point Clouds and Triangular Meshes
Bird B, Lennox B, Watson S, Wright T.
International Journal of Computational Vision and Robotics. 2019 Aug 1;9(4).
Groves K, Lennox B, West A, Gornicki K, Watson S, Carrasco J.
robotics. 2019 Jun 18. 8(2), 47.
Cheah W, Hakim Khalili H, Arvin F, Green P, Watson S, Lennox B.
International Journal of Advanced Robotic Systems. 2019 Apr 9.

A Review of Ground-Based Robotic Systems for the Characterization of Nuclear Environments
Tsitsimpelis I, Taylor CJ, Lennox B, Joyce M.
Progress in Nuclear Energy. 2019 Mar;111:109-124.
Development of a Debris Clearance Vehicle for Limited Access Environments
West C, Cheah W, Rajasekaran V, West A, Arvin F, Watson S et al.
Paper presented at UK-RAS Conference on 'Embedded Intelligence', Loughborough, United Kingdom.

Development of ROV System to Explore Fuel Debris in the Fukushima Daiichi Nuclear Power Plant
Kamada S, Katoh M, Nishimura K, Nancekievill M, Watson S, Lennox B et al.
In 9th International Symposium on Radiation Safety and Detection Technology. Atomic Energy Society of Japan. 2019
A Debris Clearance Robot for Extreme Environments
West C, Arvin F, Cheah W, West A, Watson S, Giuliani M et al.
In Towards Autonomous Robotic Systems. 2019

Embodiment of an Aquatic Surface Vehicle in an Omnidirectional Ground Robot
Lennox C, Groves K, Hondru V, Arvin F, Gornicki K, Lennox B.
Paper presented at IEEE International Conference on Mechatronics, Ilmenau, Germany.
Heggo M, Kabbabe K, Peesapati V, Gardner R, Watson S, Crowther B.
In Journal of Physics: Conference Series. Vol. 1356. IOP Publishing Ltd. 2019
Heggo M, Mohammed A, Melecio Ramirez J, Kabbabe K, Tuohy P, Watson S et al.
In Journal of Physics: Conference Series. Vol. 1356. IOP Publishing Ltd. 2019
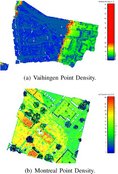
Tree Annotations in LiDAR Data Using Point Densities and Convolutional Neural Networks
Gupta A, Byrne J, Moloney D, Watson S, Yin H.
IEEE Transactions on Geoscience and Remote Sensing. 2019 Oct 11.
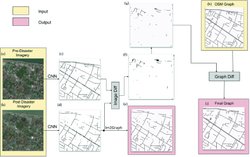
CNN-Based Semantic Change Detection in Satellite Imagery
Gupta A, Welburn E, Watson S, Yin H.
In Artificial Neural Networks and Machine Learning – ICANN 2019.
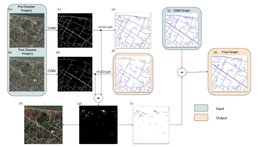
Post Disaster Mapping with Semantic Change Detection in Satellite Imagery
Gupta A, Welburn E, Watson S, Yin H.
In Proceedings of the Computer Vision and Pattern Recognition Workshops. 2019
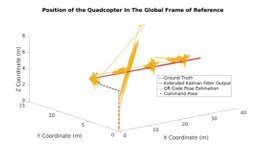
A Navigational System for Quadcopter Remote Inspection of Offshore Substations
Welburn E, Hakim Khalili H, Gupta A, Watson S, Carrasco J.
In The Fifteenth International Conference on Autonomic and Autonomous Systems 2019.
Virtual reality interface for HVDC substation and DC breaker design and maintenance
Marsh C, Barnes M, Crowther B, Watson S, Vilchis-Rodriguez D, Carmona Sanchez J et al.
Paper presented at IET AC/DC Conference, Coventry, United Kingdom.

A Mixed Reality Approach to Robotic Inspection of Remote Environments
Welburn E, Wright T, Marsh C, Lim S, Gupta A, Crowther B et al.
Paper presented at UK-RAS Conference on 'Embedded Intelligence', Loughborough, United Kingdom.

Multitemporal Aerial Image Registration Using Semantic Features
Gupta A, Peng Y, Watson S, Yin H.
In International Conference on Intelligent Data Engineering and Automated Learning. Springer Nature. 2019. p. 78-86. (Lecture Notes in Computer Science; 11872).

Improving Thermal Substation Inspections Utilising Machine Learning
Straker A, Carrasco J, Podd F, Gardner R, Cotton I.
Paper presented at Thermosense: Thermal Infrared Applications XLI, Baltimore, United States.
Advection and Diffusion Effects Towards a Bio-inspired Artificial Pheromone System
Na S, Raoufi M, Emre Turgut A, Krajnik T, Lennox B, Arvin F.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019).

Self-organised Flocking in Robotic Swarm based on Active Elastic Sheet
Raoufi M, Emre Turgut A, Lennox B, Arvin F.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019).
Development of a Multi-robotic System for Exploration of Biomass Power Plants
An S, Arvin F, Watson S, Lennox B.
Paper presented at UK-RAS Conference on 'Embedded Intelligence', Loughborough, United Kingdom.
Exploration in Extreme Environments with Swarm Robotic System
Huang X, Arvin F, West C, Watson S, Lennox B.
Paper presented at IEEE International Conference on Mechatronics, Ilmenau, Germany.

O. Skeik, J. Hu, F. Arvin and A. Lanzon.
12th International Workshop on Robot Motion and Control (RoMoCo), Poznań, Poland, 2019, pp. 15-20.
Extended Artificial Pheromone System for Swarm Robotic Applications
Na S, Raoufi M, Emre Turgut A, Krajnik T, Arvin F.
Paper presented at Conference on Artificial Life, Newcastle, United Kingdom.
Arvin F, Krajnik T, Emre Turgut A.
Paper presented at Modelling and Simulation for Autonomous Systems, Prague, Czech Republic.

Self-organized Collective Motion with a Simulated Real Robot Swarm
Raoufi M, Emre Turgut A, Arvin F.
In Towards Autonomous Robotic Systems. 2019


2018
Bird B, Griffiths A, Martin H, Codres E, Jones J, Stancu A et al.
IEEE Robotics and Automation Magazine . 2018 Dec 13.
Jones A, Nancekievill M, Lennox B, Watson S, Katakura J, Okumura K et al.
2018.
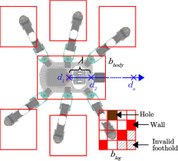
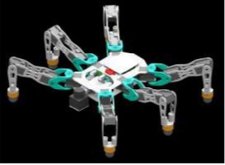
Grid-based Motion Planning using Advanced Motions for Hexapod Robots
Cheah W, Hakim Khalili H, Watson S, Green P, Lennox B.
Paper presented at IEEE International Conference on Intelligent Robots and Systems (IROS) 2018, Madrid, Spain.
West A, Watson S, Lennox B.
Paper presented at IEEE International Conference on Intelligent Robots and Systems (IROS) 2018, Madrid, Spain.
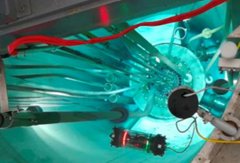
Development of a Radiological Characterization Submersible ROV for use at Fukushima Daiichi
Nancekievill M, Jones AR, Joyce MJ, Lennox B, Watson S, Katakura J et al. .
IEEE Transactions on Nuclear Science . 2018 Sep;65(9):2565-2572.
Espinosa Mendoza JL, Tsiakkas M, Wu D, Watson S, Carrasco J, Green P et al.
Paper presented at Towards Autonomous Robotic Systems , Bristol, United Kingdom.
Miniature Inspection Robot for Restricted Access eXploration (MIRRAX)
Martin H, Watson S, Lennox B, Poteau X.
In WMSYM 2018.
Robotic Platforms for Remote Access and Sensing Applications for Nuclear Decommissioning
Arvin F, Bird B, Brown L, Cheah W, Di Buono A, Espinosa Mendoza JL et al.
In WMSYM 2018.

A Remote-operated System to Map Radiation Dose in the Fukushima Daiichi Primary Containment Vessel
Nancekievill M, Jones A, Joyce M, Lennox B, Watson S, Katakura J et al.
2018.

A Bio-inspired Aggregation with Robot Swarm using Real and Simulated Mobile Robots
Ramroop S, Arvin F, Watson S, Carrasco J, Lennox B.
In Giannaccini ME, Giuliani M, Assaf T, editors, Towards Autonomous Robotic Systems - 19th Annual Conference, TAROS 2018, Proceedings. Springer Nature. 2018. p. 317-329. (Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics)).

Point Cloud Simplification by Clustering for Robotics and Computer Vision Applications
Bird B, Lennox B, Watson S.
In Tremeau A, Braz J, Imai F, editors, VISAPP. Vol. 4. Science and Technology Publications Lda. 2018. p. 113-120
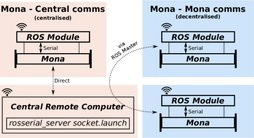
ROS Integration for Miniature Mobile Robots
West A, Arvin F, Martin H, Watson S, Lennox B.
In Giannaccini ME, Giuliani M, Assaf T, editors, Towards Autonomous Robotic Systems - 19th Annual Conference, TAROS 2018, Proceedings. Springer Nature. 2018. p. 345-356. (Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics)).
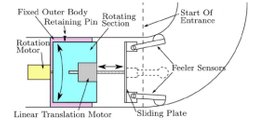
Elbow Detection in Pipes for Autonomous Navigation of Inspection Robots
Brown L, Carrasco J, Watson S, Lennox B.
Journal of Intelligent and Robotic Systems . 2018.

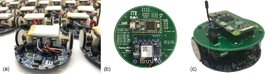
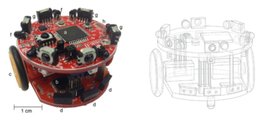
Mona: an Affordable Open-Source Mobile Robot for Education and Research
Arvin F, Espinosa Mendoza JL, Bird B, West A, Watson S, Lennox B.
Journal of Intelligent & Robotic Systems. 2018.

Gornicki K, Groves K, Carrasco J, Lennox B.
In 2018 UKACC 12th International Conference on Control, CONTROL 2018. IEEE. 2018. 8516738
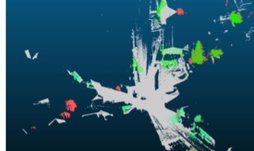
3D Convolutional Neural Networks for Tree Detection using Automatically Annotated LiDAR data
Gupta A, Byrne JJ, Moloney D, Yin H, Watson S.
2018.
Automatic Tree Annotation in LiDAR Data
Gupta A, Byrne J, Moloney D, Watson S, Yin H.
In GISTAM 2018.

Joint Space Reference Trajectory to Reduce the Energy Consumption of a Six-Legged Mobile Robot
Bodrov A, Cheah W, Green P, Watson S, Apsley J.
In 2018 25th International Workshop on Electric Drives

Comparing Model-Based and Data-Driven Controllers for an Autonomous Vehicle Task
López Pulgarín EJ, Irmak T, Variath Paul J, Meekul A, Herrmann G, Leonards U.
2018. 13 p.

ΦClust: Pheromone-based Aggregation for Robotic Swarms
Arvin F, Emre Turgut A, Krajnik T, Rahimi S, Ege Okay I, Yue S et al.
Paper presented at IEEE International Conference on Intelligent Robots and Systems (IROS) 2018, Madrid, Spain.
A Bio-inspired Aggregation with Robot Swarm using Real and Simulated Mobile Robots
Ramroop S, Arvin F, Watson S, Carrasco J, Lennox B.
In Giannaccini ME, Giuliani M, Assaf T, editors, Towards Autonomous Robotic Systems - 19th Annual Conference, TAROS 2018, Proceedings. Springer Nature. 2018. p. 317-329. (Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics)).
The Radiation Tolerance and Development of Robotic Platforms for Nuclear Decommissioning
Nancekievill, M.
Thesis
2017
Wireless Communications in Nuclear Decommissioning Environments
Di Buono A, Cockbain N, Green P, Lennox B.
Paper presented at UK-RAS Conference on ‘Robotics and Autonomous Systems, Bristol , United Kingdom.
FURO: Pipe Inspection Robot for Radiological Characterisation
Brown L, Carrasco J, Watson S, Lennox B.
Paper presented at UK-RAS Conference on ‘Robotics and Autonomous Systems, Bristol , United Kingdom.

Algorithmic Approach to Planar Void Detection and Validation in Point Clouds
Wright T, Lennox B.
2017. Paper presented at 18th Annual Conference on Towards Autonomous Robotic Systems, TAROS 2017, Guildford, United Kingdom.
Nancekievill M, Watson S, Green P, Lennox B.
Paper presented at 2016 IEEE Radiation Effects Data Workshop (REDW).
Mona: an Affordable Mobile Robot for Swarm Robotic Applications
Arvin F, Espinosa Mendoza JL, Bird B, West A, Watson S, Lennox B.
In UK-RAS Conference on ‘Robotics and Autonomous Systems. 2017. p. 49-52
Multi-plane Motion Planning for Multi-Legged Robots
Cheah W, Green P, Watson S, Lennox B, Arvin F.
In UK-RAS Conference on Robotics and Autonomous Systems. 2017. p. 68-70
Perpetual Robot Swarm: Long-Term Autonomy of Mobile Robots Using On-the-fly Inductive
Arvin F, Watson S, Emre Turgut A, Espinosa Mendoza JL, Krajnik T, Lennox B.
Journal of Intelligent & Robotic Systems. 2017 Oct 9
2016
On the Design of a Remotely-Deployed Detection System for Reactor Assessment at Fukushima Daiichi
Jones A, Griffiths A, Joyce M, Lennox B, Watson S, Katakura J et al.
In IEEE Nuclear Science Symposium 2016.

Mobile Robots and Remote Characterisation Systems for Nuclear Decommissioning
Arvin F, Ayoola O, Bird B, Brown L, Carrasco J, Cheah W et al.
Paper presented at Waste Management Symposium 2016, Phoenix, United States.

AVEXIS—Aqua Vehicle Explorer for In-Situ Sensing
Griffiths A, Dikarev A, Green P, Lennox B, Poteau X, Watson S
IEEE Robotics and Automation Letters. 2016 Jan 20;1(1):282.

Herrmann G, Jalani J, Mahyuddin MN, Khan SG, Melhuish CR.
Robotica. 2016 Oct;34(10):2163-2185
A Bio-inspired Embedded Vision System for Autonomous Micro-robots: the LGMD Case
Hu C, Arvin F, Xiong, C, Yue S.
IEEE Transactions on Autonomous Mental Development . 2016 May 30;9(3):241-254.

Investigation of Cue-Based Aggregation in Static and Dynamic Environments with a Mobile Robot Swarm
Arvin F, Emre Turgut A, Krajnik T, Yue S.
Adaptive Behavior. 2016 Apr;24(2): 102-118 .
2015
Robotic Systems for Remote Characterisation and Decommissioning
Watson S, Lennox B, Stancu A.
In host publication. 2015
Development of Irradiation Capabilities to Address the Challenges of the Nuclear Industry
Leay L, Bower W, Horne G, Wady P, Baidak A, Pottinger M et al.
Nuclear Instruments & Methods in Physics Research. Section B: Beam Interactions with Materials and Atoms. 2015 Jan 15;343:62-69.
Robotic Inspection Vehicle for HVDC-VSC Facilities: Inspection of HVDC VSC Offshore Substations
Carmona Sanchez J, Watson S.
University of Manchester, 2015. 71 p.

COS-phi: Artificial Pheromone System for Robotic Swarms Research
Arvin F, Krajnik T, Emre Turgut A, Yue S.
2015.

Power-Law Distribution of Long-Term Experimental Data in Swarm Robotics
Arvin F, Attar A, Turgut AE, Yue S.
In Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics). Vol. 9140. Springer Nature. 2015. p. 551-559. (Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics)).
2014

Remote Characterization Technology for Decommissioning
Watson S, Green P, Lennox B, Stancu A, Dowson M.
In host publication. 2014
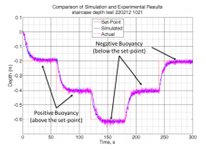
Depth Control for Micro-Autonomous Underwater Vehicles (μAUVs): Simulation and Experimentation
Watson SA, Green PN.
International Journal of Advanced Robotic Systems. 2014 Mar 3;11(31).
Colias: An Autonomous Micro Robot for Swarm Robotic Applications
Arvin F, Murray J, Zhang C, Yue S.
International Journal of Advanced Robotic Systems. 2014 Jul 30;11.
Cue-based Aggregation with a Mobile Robot swarm: A Novel Fuzzy-based Method
Arvin F, Turgut AE, Bazyari F, Arikan KB, Bellotto N, Yue S.
Adaptive Behavior. 2014 Jun;22(3):189-206.
Comparison of Different Cue-Based Swarm Aggregation Strategies
Arvin F, Turgut AE, Bellotto N, Yue S.
In International Conference in Swarm Intelligence: Advances in Swarm Intelligence. Vol. 8794. 2014. p. 1-8. (Lecture Notes in Computer Science).

Development of an Autonomous Micro Robot for Swarm Robotics
Arvin F, Murray JC, Shi L, Zhang C, Yue S.
In Mechatronics and Automation (ICMA), 2014 IEEE International Conference on. IEEE. 2014. p. 635-640
2012

The Mechatronic Design of a Micro-Autonomous Underwater Vehicle
Watson SA, Crutchley DJP, Green PN.
International Journal of Mechatronics and Automation (IJMA). 2012;2(3):157-168.
Implementation of a Cue-Based Aggregation with a Swarm Robotic System
Arvin F, Doraisamy SC, Samsudin K, Ahmad FA, Ramli AR.
In Communications in Computer and Information Science: Knowledge Technology. Vol. 295. 2012. p. 113-122. (Communications in Computer and Information Science).

Robust Control of a Micro-Autonomous Underwater Vehicle (uAUV) Using Low-Tolerance Components
Watson SA, Green PN.
In 3rd IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles. 2012

Acoustic Sensor Networks for Decommissioning
York TA, Green PN, Green PR, Phasouliotis A, Qu Z, Watson S et al.
Measurement and Control. 2012 Mar;45(2):48-54.
Get in Touch
Dept. of Electrical and Electronic Engineering
The University of Manchester
Engineering Building A
Oxford Road
Manchester
M13 9PL